Firmu SMAUT založila skupina českých podnikatelů s několikaletou zkušeností s výstavbou solárních elektráren a jejím prvotním cílem bylo co nejvíce zautomatizovat provoz v areálech kde jsou solární elektrárny umístěny. Samotný provoz FVE automatický je, ale vyžaduje určitou kontrolu a též údržbu ploch mezi fotovoltaickými panely. Mezi úkony, které se automatizují obtížně patří nutnost pravidelného sečení trávy, čištění panelů a kontrola kabelového spojení. A tyto úkony mohou zajistit roboty.
Na osvědčené platformě
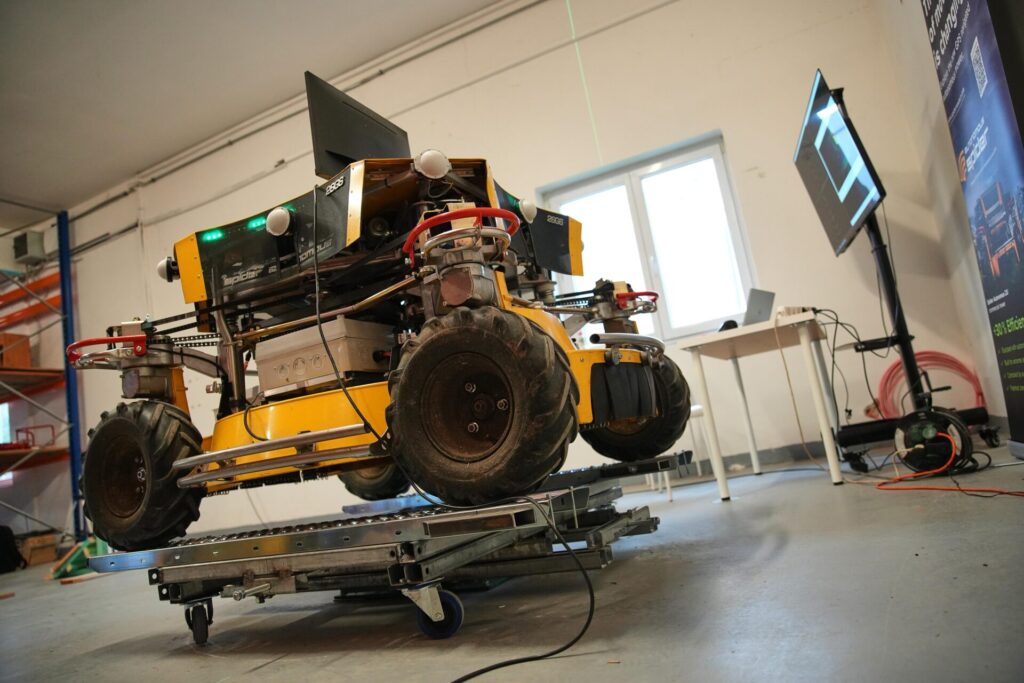
Jako žací jednotka pro vývoj autonomně se pohybujícího stroje byla zvolena dálkově řízená sekačka Spider, přičemž dálkové ovládání umožnilo snadnější implementaci systémů autonomního pohybu. Krom toho i rozměry, obratnost a výkonnost sekačky byly vhodné pro sečení v solárních elektrárnách.
Vývoj autonomního řízení sekačky začal před pěti lety a od roku 2023 má Spider Autonomous 2.0 evropskou certifikaci pro práci v uzavřených prostorech, což oplocené solární parky splňují.
Všechny verze autonomních sekaček využívají signál GPS, který je s pomocí RTK korekčního signálu vylepšován na přesnost navádění +/- 1 cm. Firma SMAUT využívá vlastní korekční stanice a korekční signál je možné přijímat jak přes síť mobilních operátorů, tak pomocí UHF radiových vln. Zajímavostí je jistě to, že jak hlavní řídící jednotku, tak přijímač si ve firmě SMAUT vyrábějí sami.
Pět úrovní robotiky
Ve firmě SMAUT mají definovaných několik úrovní robotického provozu. Pro provoz homologovaný Autonomous 2.0 je v takzvaném levelu 0. To znamená, že seče jen prostory mezi řadami panelů a kvůli ztrátě GPS signálu nezajíždí pod ně. I tak zvládne posekat až 50 % plochy, v případě naklápěcích panelů i více. Sekačka jezdí po předem definované trase v níž jsou přesně zaznamenané pozice řad panelů (předchozím snímkováním s využitím dronů), do řad panelů nezajíždí. Neumí reagovat na nenadálé překážky a zvládne posekat zhruba 0,5 ha za hodinu.
V současné době ve firmě SMAUT testují robota v levelu 1, který už na nenadálé překážky reagovat bude. Celý vývoj pomáhá urychlovat spolupráce s CIIRC, tedy Českým institutem informatiky, robotiky a kybernetiky, který je součástí ČVUT.
Nový Autonomous využívá zejména osm radarových senzorů pravidelně rozmístěných po celém jeho obvodu. Radarové senzory se ukázaly jako nejvhodnější řešení, protože dokáží dobře rozlišit podpěrné sloupky panelů a další překážky i ve vysoké trávě. Tento vylepšený robot už může zajíždět i pod řady panelů, zvládne posekat až 85 % plochy solární elektrárny a nabízí se jeho širší uplatnění například v lesních školkách, sadech vinicích nebo jiných trvalých kulturách, kde je nutné udržovat meziřadí v bezplevelném stavu.
Současně probíhá i vývoj robota v levelu 2. Ten bude používat i lidar a případně další snímače (kamery, ultrazvukové senzory atp.) a bude umět rozlišovat různé druhy překážek. Tím bude mít lepší orientační schopnosti a bude si umět naplánovat alternativní trasu při objíždění nenadálých překážek. Takovýto stroj už může vysekat až 95 % plochy solární elektrárny.
Vyšší úrovní autonomního provozu je úroveň 3 v níž má robot vysokou schopnost orientace v prostředí a přesnost v rozpoznávání překážek. Robot si sám naplánuje trasy a daný pozemek poseče systémem jízd zvoleným podle vlastního uvážení, tedy s využitím algoritmů v řídící jednotce si navrhne vlastní plán jízd, tak aby v něm bylo minimum těch neproduktivních.
A na vrcholu automatizace či spíše robotiky je ona zmíněná třešnička na dortu. Tedy level 4 a sečení v prostředí, které není přesně ohraničené, tedy třeba ono sečení v parku, kde se vyskytuje řada nenadálých situací a hlavně lidé, které robot nesmí ohrozit.